Telexistence株式会社登壇|東大IPC DEEPTECH DIVE Live! #9「ロボットで人の『労働』が変わる」ハイライトレポート ※動画あり
【目次】
当日動画を視聴希望の方はこちらをクリック
東大IPCのオンラインキャリアイベント「DEEPTECH DIVE LIVE!」第9回を2021年12月1日(水)に開催しました。このイベントは、キャリアコミュニティサービスDEEPTECH DIVEについて知っていただくために、東大IPCの支援するスタートアップ企業にご登壇いただき、業界の動向、起業エピソード、直近の募集職種などについてカジュアルにお話しいただくというものです。
今回は「ロボットで人の『労働』が変わる」をテーマに、ロボットと遠隔操作のトップランナーであるTelexistence(テレイグジスタンス)株式会社の富岡仁さん(代表取締役CEO)と、サフキン・パーベルさん(Head of Automation)にご登場いただき、技術の最前線について語っていただきました。こちらの記事では、特に盛り上がった内容についてハイライトでお伝えします。
▼登壇者プロフィール(順不同)
富岡仁氏 TELEXISTENCE inc. 代表取締役CEO
スタンフォード大学経営大学院修士卒。2004年三菱商事入社、海外電力資産の買収などに従事。東京大学の舘名誉教授のテレイグジスタンス技術に魅了され、2017年1月にテレイグジスタンス株式会社を起業。2018年5月量産型プロトタイプ開発に成功。2020年に半自律型遠隔操作ロボットModel-Tのコンビニへの実装を実現。小売業界における拡張労働基盤の構築やロボットの活躍の場を工場の外に広げ、社会の基本的なあり方を変革することを目指す。
サフキン・パーベル氏 TELEXISTENCE inc. Head of Automation
6歳で来日、以降23年間日本で過ごす。早稲田大学先進理工学研究科修士号。2017年VRヘッドセットの会社FOVEへ入社し、インターン時から携わっていたヘッドセットの3次元姿勢推定アルゴリズム、及び視線追跡アルゴリズムの開発に携わり、後にVP of Researchとなる。2018年宇宙ロボット分野の会社であるSE4をCTOとして創業し、遅延に影響を受けないロボットの遠隔操作技術を研究開発する。21年2月TX入社、コンビニにおける飲料陳列の完全自動化を目指しチームとともに日々開発を行っている。コンピュータビジョン、機械学習(強化学習・ディープラーニング含む)、ロボティクス、VR分野に興味がある。技術の価値は社会実装にこそあると考える。
工場を飛び出して活躍の場を広げるロボット
ーーまずは富岡さんから、現在の事業について教えてください。
富岡:我々はロボットを作って、社会実装を図っている会社です。2021年で設立5年目、社員は30名ほどで、半分以上は外国人の方が占めており、そのほとんどがエンジニアです。資金調達はこれまで3回行い、合計45億円ほどを調達しました。これに加えて、助成金や借入で50億円ほど資金を調達しています。
私の好きな言葉に、「未来はすでに存在している。ただ均等に散らばっていないだけだ。」(ウィリアム・ギブスン、SF作家)があります。簡単にいえば、「世の中を見ると、未来のサインが存在している」という意味です。
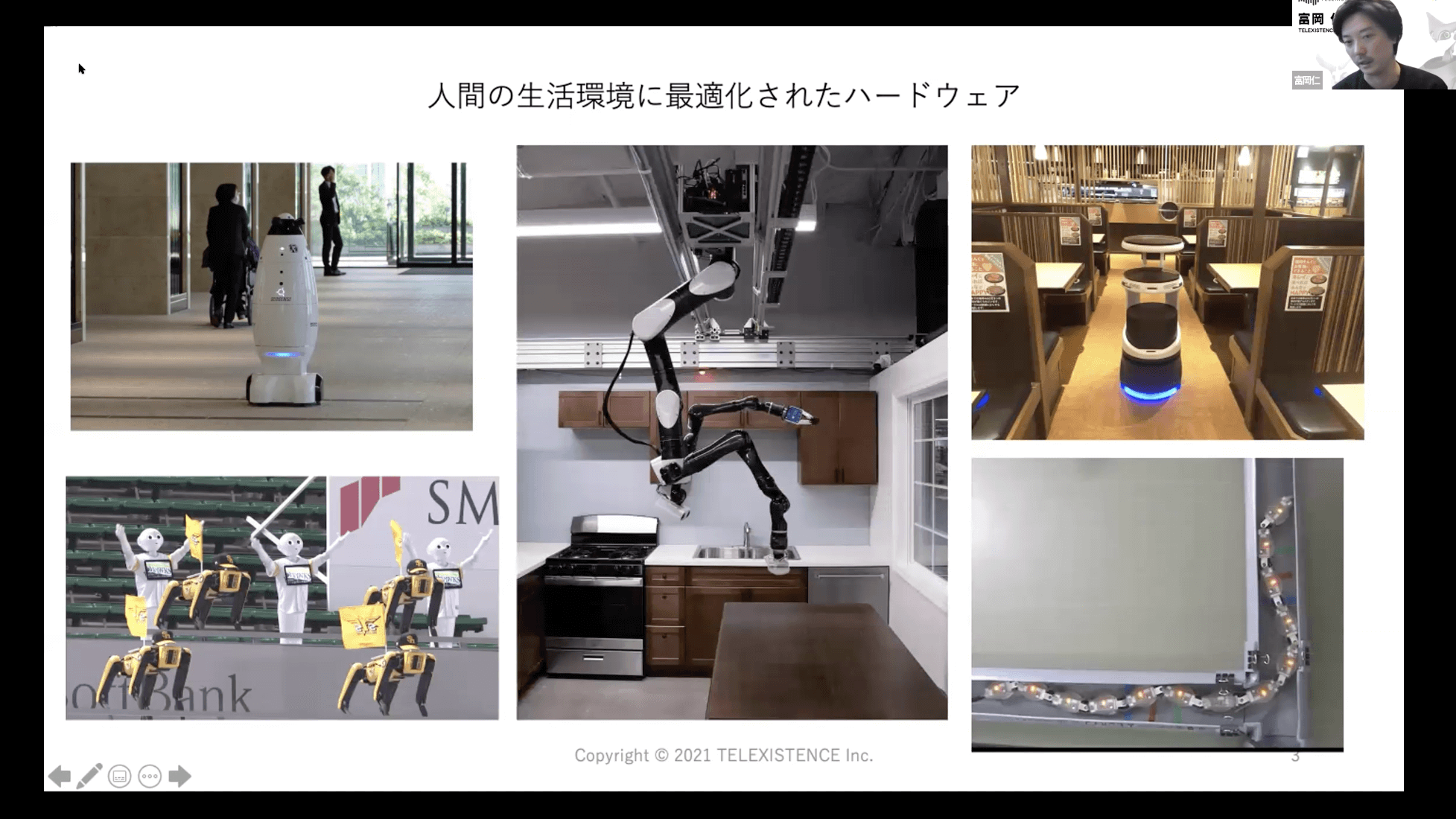
これまでは工場で働いている「産業ロボット」がメインでしたが、現在のロボットは工場を飛び出し始めており、活躍の場を広げています。最近では、機械学習やコンピュータビジョンを用いながら、ダイナミックな環境でロボットが活躍する様子を見かけるようになってきている状況です。
工場の外で、いかにロボットを社会実装していくのか
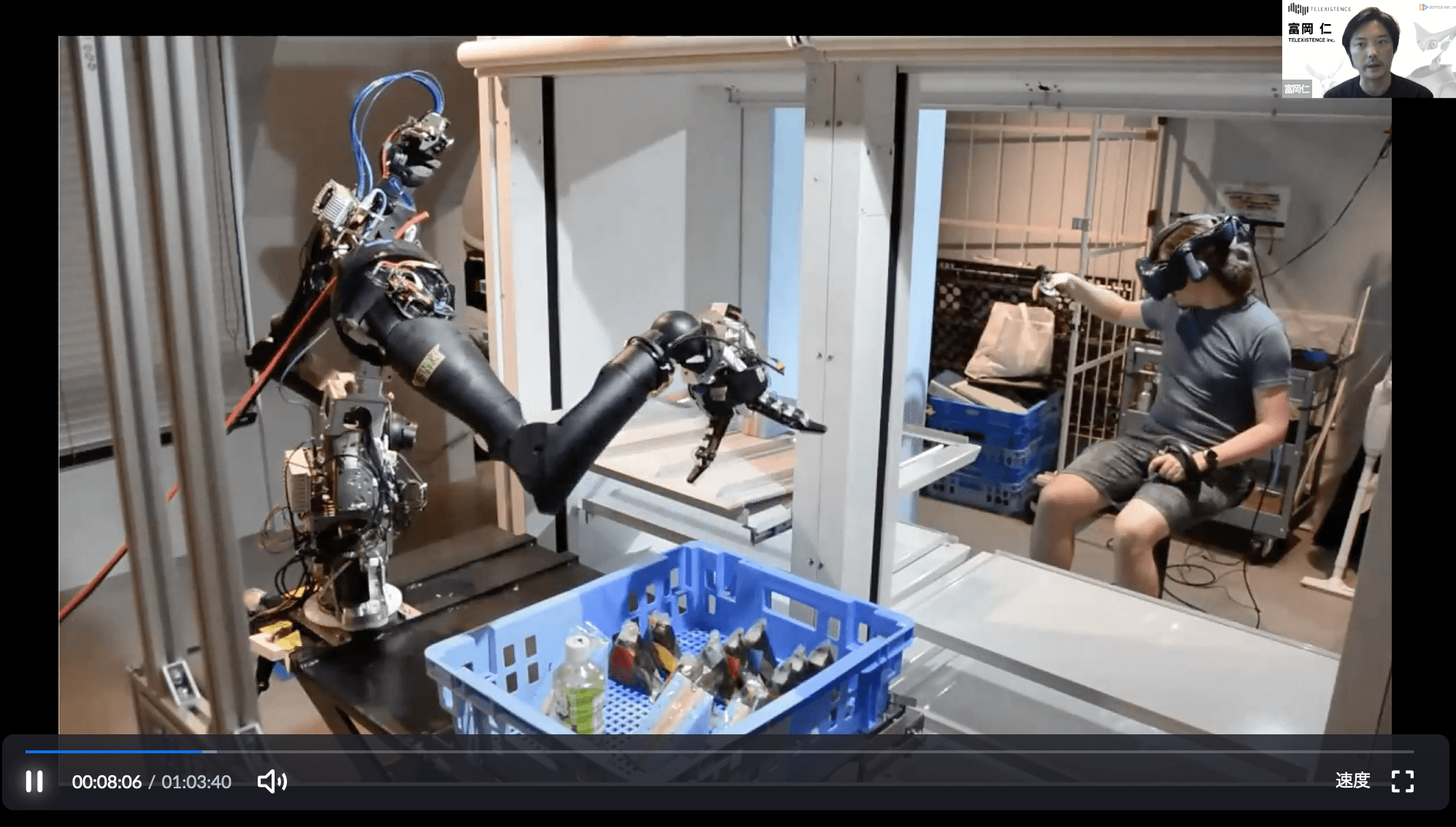
富岡:我々のやりたいことは、「工場の外で、いかにロボットを社会実装していくのか」に尽きます。ただし、他の会社とは違い、「AIで解決できない部分を遠隔操作で補う」点に技術的な特徴があります。
ダイナミックに環境が変化する中で、これに対応しながらロボットを制御していくには、「フレーム問題」が大きな壁として立ちはだかります。フレーム問題とは「事前に想定していたこと以外の出来事が起きると、機械学習(深層学習)が機能しなくなる」問題のことです。この問題は今後20年〜30年ほどは乗り越えられないと考えていますが、我々はこの期間をただ待つのではなく、遠隔操作を用いながらロボットの社会実装を目指しています。
機械学習の不足部分を人間の遠隔操作で補う
富岡:我々の目的は「工場の外(世界)にロボットを実装して、世の中にある身体性を伴う単純労働をすべてロボットに置き換える」ことです。これを掲げている理由は、「基本的に単純労働は単調でつまらなく、人間が行う必要はない」と考えているためです。日本やその他の先進国においては、益々希少になっていく人間の労働リソースをこういった仕事に分配していくのは合理的ではありません。人はより付加価値の高い仕事を担うべきです。
現在でも依然として人間が単純労働を担っているのは、機械学習のフレーム問題が完全に解決できていないことが一つの原因です。これを解決すべく、我々は機械学習の不足部分を遠隔操作で補う形でロボットの社会実装を図っているのです。現在は少子高齢化による人手不足の影響を解消すべく、社会インフラである小売・物流分野でロボットの導入を進めています。
弊社の技術的なアプローチについては、サフキンから紹介します。
コンビニの飲料陳列を行うAI「GORDON(ゴードン)」

サフキン:人間が行っている単純労働の1つである「コンビニの飲料陳列」に対して弊社がロボットを用いて出した答えである「自動飲料陳列システム」について、技術的な部分をお話します。
まずは、実際にコンビニの飲料陳列を行うロボットに導入しているAI「GORDON(ゴードン)」の紹介です。このAIは、「在庫棚にある飲料を陳列棚に移すこと」と「陳列棚の飲料がどれほど減っているのかを24時間モニタリングし、減ってきている飲料を補充すること」の2つを行っています。また、「特に売れ行きが高い飲料は在庫を頻繁に入れて、売れ行きが低いものは時間を置いてから入れる」というような作業も、モニタリングにより実現しています。
飲料には缶・ペットボトル合わせて非常に多くの種類(大きさ)がありますが、どの種類の飲料であってもすべて同じアームで掴めるように、アームの精度や強度、カメラの画角などを工夫しています。また、缶とペットボトルでは「持ちやすい位置」が異なるため、AIに教え込んで持ちやすい位置で持ってもらうようにゼロから開発しています。
そのほか、「陳列棚の仕切りの部分にアームを当てずに回避できるようにすること」や「コンビニの各店舗に置いて汎用的に運用できるようにすること」など、画像認識だけでなく動作計画の部分についても社内で開発を行っています。
1陳列あたり30秒〜50秒ほどの時間がかかりますが、これを24時間続けると約1,000回の陳列を行えます。現在は、98%の精度で完全に自動で陳列できている状況です。
残りの2%は、人間に入ってもらって解決
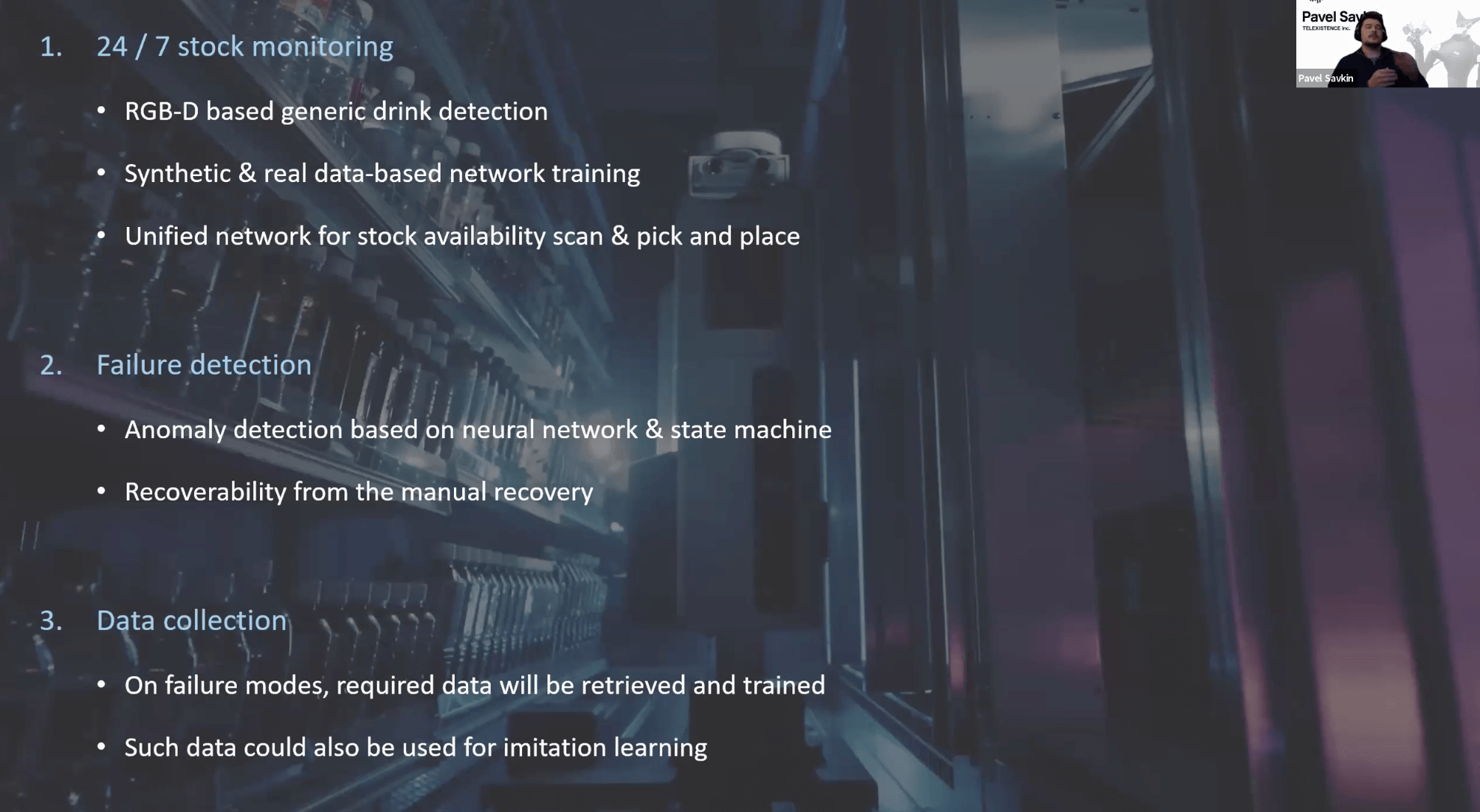
サフキン:技術・機能についてもう少し詳しく紹介すると、24時間の在庫状況モニタリングでは、「RGB-Dカメラ」を用いて飲料の認識を汎用的に行っています。また、機械学習では、すべて現実の画像を用いているわけではなく、存在しない画像(シミュレーター)を多く作って用いています。そこに現実世界の画像・データを組み合わせることで、非常に高い精度を実現しています。そして、すべての動作を同じネットワークで制御しているため、コンピューターリソース的に効率の良い状況を作っている点も特徴的です。
なお、98%の精度を出している一方で、残りの2%(飲料が倒れるなど予想し得ない状況が発生した場合)は、人間に入ってもらって解決することになります。このときに、弊社では、遠隔操作を用いて復旧(リカバリー)するという仕組みです。
そのほか、「失敗を失敗として検出・認識する機能」や、「失敗時のデータを活用して精度を上げるための機能」なども組み込んでいます。
今後は98%の精度を99%や99.9%に高めていくために開発
サフキン:98%の精度を実現するAIを導入しただけでは、製品にはなりません。残りの2%を遠隔操作で補うことで、導入している店舗や会社の従業員さんに100%の精度を感じてもらえて、製品が出来上がるものだと考えています。現在は、この98%の精度を99%や99.9%に高めていくために開発を行っている状況です。
コンビニはフォーマットが統一されていて、ロボットを導入しやすい
ーー御社が小売や物流業界をターゲットにしている理由は、どういったものでしょうか?
富岡:我々は、工場の外にロボットを普及させるうえで、最も困っている分野の人に技術の恩恵を与えるべきだと考えています。そこで、いかなる分野が最も困っているかを考えたときに、毎日の生活で使うインフラである小売と物流の業界が挙がりました。
ーー小売や物流業界をターゲットにしていく中で、これらの業界ならではの特徴(役立てる部分、難しい部分など)は感じますか?
富岡:ビジネスの観点でいうと、コンビニの場合は、ロボットを導入しやすい点が特徴的です。これは、5万6,000店の店舗フォーマットがほとんどすべて統一されていて、取扱い商品が同じであるためです。1店舗でロボットで陳列できるようなソリューションを作れれば、5万6,000店に水平展開できます。水平展開できる利点を述べると、我々はハードウェアを開発している会社であり、スケールを出すことでコストの削減につながります。
サフキン:技術的にも同じことが言えて、店舗フォーマットが統一されているために、普遍化できる作業が多い点が特徴的です。1つソリューションを解決してしまえば、他の店舗に応用展開できます。
自動化だけで実現できることは何もない
ーーオートメーション化の技術で実現できることについて、どのようにお考えなのかお伺いできますか?
サフキン:自動化だけで実現できることは何もないと考えています。現実世界において100%という数字は存在していなくて、失敗がどれほどあるのかという世界だと思います。ただ、この状況に人間の手が介入するだけで、何でも実現できるようになるので、この点を面白いと感じています。
90%以上の精度をAIが出せるようになると、1人の人間が1つのロボットに付きっきりになる必要がなくなり、1人の人間が4つ〜5つのロボットを監視して、失敗したら直せば良いという運用が行えます。つまり、1人の人間が行えることが拡張されます。この考え方は、少子高齢化への対応や人間の能力拡張を行ううえで重要です。いうなれば、「人間が他のことを考えるための時間が増える」というのが1つの回答になると思います。
失敗の検出や人間の介入を見逃さないためのデータ収集が重要
ーー御社で開発しているシステムの中で、重要なコンポーネント(部品、要素)はどのようなものでしょうか?
サフキン:精度を98%から100%にするためには人間の介入が必要なので、これを行うために失敗の検出や人間の介入を見逃さないためのデータ収集などが大切です。自動化して終了ではなく、その後に改良し続けてより良くしていく、という部分を重要視しています。これまでも、人間の介入ありき、失敗の検出ありきで開発を続けてきました。
富岡:これまでは広い工場で活躍する産業ロボットばかりが作れてきていて、コンビニの狭い環境で柔軟に動ける多関節のロボットは存在しませんでした。ただ、反対にいうと、こうした多関節のロボットが存在しないと、機械学習があっても意味がありません。
外の環境に最適化されたハードウェアとしてのロボットを作る点もセットで誰かが行わないといけない状況であったため、これも我社で開発を手掛けたコンポーネントの1つだといえます。
ロボット関連のビジネスは本当に難しいが、ベンチャーとしての勝機もある
ーーロボットのビジネス化における採算性について、ビジネスモデルとともに解説していただけると嬉しいです。
富岡:私はロボットの分野に携わるようになって5年が経ちますが、ロボット関連のビジネスは本当に難しいです(笑)。これまでの失敗からわかったことを述べると、ハードウェア・ソフトウェアもすべて手掛ける事業では、スケールを出さないと話になりません。スケールを出すには、ハードウェアのコストを下げたり、導入しやすくしたりする必要があります。
また、ビジネスモデルでいうと、日々のランニングでビジネスを行う小売などの業界に対しては、ロボット導入時にワンショット(1度きりの販売)でハードウェアを売り切るのは相性がよくありません。なので、売り切りモデルではなく、「顧客のOpexの中から対価を貰う」というビジネスモデルを構築する必要があります。そのためには、最初に弊社でロボットを量産し、キャッシュアウトがまとめて出ます。つまり、これを実現できるファイナンスをしなければならず、このためには投資家が興味を示すビジネスプランを作る必要がある、というイメージです(笑)。
サフキン:これに加えて、限られたリソースの中ですべてを解決できる完璧なAIを作らないといけないので、なかなか難しいですね(笑)。
富岡:ただ、難しくて他に誰もやろうとしないからこそ、ベンチャーとして飛び込んだときに勝機があるので、やる価値はあると思いますね。
機械学習、コンピュータビジョン、ロボット制御などの経験者を募集
ーーロボットを遠隔操作するために人間を待機させる必要があると思いますが、将来的に「ロボット対待機する人間」の比率はどれくらいになると予想していますか?
富岡:実際のケースを交えてお話しすると、現在関東のコンビニ店舗にロボットを導入していますが、2%の失敗を補うために基本的には1人で対応しています。ただ、今後どれくらいの比率になるかは正直なところわからないです(笑)。
これから実際にやってみて、どのような分散で失敗計数が生じて、それを解決するために何名の人が生じるのかなどを調整していく必要があります。
ーー現在取り組んでいる事業の中で、システム・開発面での募集職種を知りたいです。
富岡:基本的には、ハードウェア(ロボット)の制御や機械学習などに関するエンジニアです。
サフキン:経験採用だけを考えているわけではなく、機械学習の分野でいうと、機械学習の経験をもとに他の分野も学べるような人、その抵抗がない人などを募集しています。機械学習、コンピュータビジョン、ロボット制御などの経験を持っている人がいれば、お待ちしております。
ーー本日はどうもありがとうございました。
東大IPC、次回のセミナーについて
東京大学協創プラットフォーム開発では次回セミナー「東大IPC無料オンラインセミナー DEEPTECH DIVE Live! #10 衛星データによる新しい未来創造」を12月14日(火)に開催予定ですので、ぜひご参加ください!
東大IPCのイベント等の最新情報はツイッター、Facebookでご紹介いたしますので、ぜひフォローお願いいたします。

また、キャリアコミュニティサービスDEEPTECH DIVEではスタートアップにご興味をお持ちの方のご登録をいつでもお待ちしております。
いますぐのキャリアチェンジをお考えでなくても、随時こちらからメルマガ等で情報をご提供いたしますので、まずはご登録を!
毎月下旬の夜にはオンラインでキャリアカフェも開催しています。同じ志向をもった仲間が集まり、東大IPC担当者とカジュアルにお話しいただけますので、お気軽にお申し込みください。